
|
個人情報保護方針 お支払いについて お問い合わせ |
Rock Compute Module CM3でI2Cを使用(RTCとPWMファンコントローラ)Raspberry Piといえば、HAT(GPIO)です。HATにはSPI,I2C,I2S,PWM,GPIO等の拡張機能があり、RockCM3+CM4I/Oボードのdtbを適用している場合、/dev/i2c-0と/dev/i2c-6が有効になっています。オーバーレイは使用していません。I2Cバスに接続されているデバイスの動作確認を行っていきます。 mraaとi2cdetect RTCの動作確認 FAN制御用EMC2301 ユーザーモードでのI2Cアクセス ユーザーモードでのGPIOアクセス ユーザーモードでのPWMアクセス I2C/PWM/GPIOによるファンコントローラ |
mraa-i2cとi2cdetectI2C0のアドレス20はRK817(PMIC+Codec)のようです。 $ i2cdetect -l i2c-6 unknown DesignWare HDMI N/A i2c-0 unknown rk3x-i2c N/A $ sudo i2cdetect -y 0 0 1 2 3 4 5 6 7 8 9 a b c d e f 00: -- -- -- -- -- -- -- -- -- 0c -- -- -- 10: -- -- -- -- -- -- -- -- -- -- -- -- UU -- -- -- 20: UU -- -- -- -- -- -- -- -- -- -- -- -- -- -- 2f 30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 50: -- 51 -- -- -- -- -- -- -- -- -- -- -- -- -- -- 60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 70: -- -- -- -- -- -- -- -- 次にmraaを試します。基本的に同じことができます。Rock CM3 I/Oボードを使用している場合にはRadxaのwikiに従ってダウンロードします。 $ sudo apt-get install -y libgtest-dev pkg-config cmake-data $ git clone -b master https://github.com/radxa/mraa.git $ cd mraa Raspbery Pi CM4 I/Oボードを使用している場合には以下からダウンロードします。(Rock CM3 I/Oボードも対応しています) CM4 I/O Board対応版mraa: mraa_cm3_rpi_cm4.tar.gz ここで、CMakeList.txtを編集して option (BUILDSWIGNODE "Build swig node modules." ON) option (USEPYTHON3TESTS "Force tests to run with python3" OFF) の2行を option (BUILDSWIGNODE "Build swig node modules." OFF) option (USEPYTHON3TESTS "Force tests to run with python3" ON) に書き換えます。そのあとビルドします。 $ mkdir build $ cd build/ $ cmake .. $ make $ sudo make install $ sudo ldconfig $ mraa-i2c version Version v2.1.0-26-gd59936f on Radxa ROCK CM3 IO $ mraa-i2c list Bus 0: id-00 type-linux default Bus 1: id-06 type-linux $ mraa-i2c detect 0 00: -- -- -- -- -- -- -- -- -- -- -- -- 0c -- -- -- 10: -- -- -- -- -- -- -- -- -- -- -- -- 1c -- -- -- 20: 20 -- -- -- -- -- -- -- -- -- -- -- -- -- -- 2f 30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 50: -- 51 -- -- -- -- -- -- -- -- -- -- -- -- -- -- 60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 70: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- $ sudo i2cdetect -y 1 00: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 30: 30 -- -- -- -- -- -- -- -- -- 3a -- -- -- -- -- 40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 50: 50 -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 70: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- Addr:20 RockChip RK817-5 PMIC+Codec (CM3) Addr:2F EMC2301 FanController (CM4 I/O Board) Addr:51 PCF8563 - Real-time clock/calendar (CM4 I/O Board)  I2Cのアドレスは7bitしかないので、同じアドレスをもつデバイスは多数存在しますが、ある程度特定できます。 I2C Address List https://i2cdevices.org/addresses Bus0 Addr 1C 47L04/47C04/47L16/47C16 - 4K/16K I2C Serial EERAM - Control register FXOS8700 - 6-axis sensor with integrated linear accelerometer and magnetometer MCP9808 - ±0.5°C Maximum Accuracy Digital Temperature Sensor MMA845x - 3-axis, 14-bit/8-bit digital accelerometer Addr 20 Chirp! - Water sensor FXAS21002 - 3-axis gyroscope HW-061 - I2C Serial Interface LCD1602 Adapter MA12070P - Merus Multi level Class D Interated amplifier MCP23008 - 8-Bit I/O Expander with Serial Interface I2C GPIO expander MCP23017 - I2C GPIO expander PCA6408A - Low-voltage, 8-bit I2C-bus and SMBus I/O expander PCF8575 - Remote16-BIT I2C AND SMBus I/O Expander withInterrupt Output TCA9554 - 4 Low Voltage 8-Bit I 2C and SMBus Low-Power I/O Expander With Interrupt XD8574A - I2C 8-Bit I/O Expander Addr 2f AD5243 - Dual, 256-Position, I2 C-Compatible Digital Potentiometer AD5248 - Dual, 256-Position, I2 C-Compatible Digital Potentiometer AD5251 - Dual 64-Position I2 C Nonvolatile Memory Digital Potentiometers AD5252 - Dual 256-Position I2C Nonvolatile Memory Digital Potentiometers DS1881 - Dual NV Audio Taper Digital Potentiometer MCP4532 - 7/8-Bit Single/Dual I2C Digital POT with Volatile Memory *EMC2301 FanController Addr 51 AT24C64 - 2-Wire Serial EEPROM 64K (8192 x 8) CAT24C512 - EEPROM - 512Kbit - 64KB LM25066 - PMBus power management IC MB85RC - Ferroelectric RAM PCA9685 - 16-channel PWM driver default address *PCF8563 - Real-time clock/calendar VCNL4200 - High Sensitivity Long Distance Proximity and Ambient Light Sensor With I2C Interface Bus6 Addr 30 SAA2502 - MPEG audio source decoder Addr 3a MLX90632 - FIR temperature sensor PCF8574AP - I2C-bus to parallel port expander PCF8577C - 32/64-segment LCD display driver SAA1064 - 4-digit LED driver Addr 50 47L04/47C04/47L16/47C16 - 4K/16K I2C Serial EERAM - SRAM Memory with EEPROM backup AT24C64 - 2-Wire Serial EEPROM 64K (8192 x 8) CAT24C512 - EEPROM - 512Kbit - 64KB FS1015 - Air Velocity Sensor Module -- 0-5, 0-15m/sec LM25066 - PMBus power management IC MB85RC - Ferroelectric RAM PCA9685 - 16-channel PWM driver default address 参考資料: https://linuxhint.com/i2c-linux-utilities/ 参考資料: https://wiki.radxa.com/Mraa |
RTCの動作確認$ sudo vi /boot/config.txt [pi4] # Enable DRM VC4 V3D driver on top of the dispmanx display stack dtoverlay=vc4-fkms-v3d max_framebuffers=2 [cm4] dtparam=i2c_vc=on dtoverlay=i2c-rtc,pcf85063a,i2c_csi_dsi Rock CM3でdtbをCM4 I/Oボード用に差し替えた場合には必要なI2Cは有効になっています。 $ ls /dev/i2c* /dev/i2c-0 /dev/i2c-6 I2Cバスが有効でないか、RTCデバイスが見つからない場合には以下のように表示されます。 $ timedatectl Local time: 水 2020-12-16 19:58:01 JST Universal time: 水 2020-12-16 10:58:01 UTC RTC time: n/a Time zone: Japan (JST, +0900) System clock synchronized: no NTP service: active RTC in local TZ: no RTCデバイスにアクセス可能な場合には以下のように表示されます。RockCM3の場合にはRK817デバイスが、CM3上に搭載されているのでこちらのRTCが見えているのかもしれません。 $ timedatectl Local time: 水 2020-12-16 19:56:22 JST Universal time: 水 2020-12-16 10:56:22 UTC RTC time: 水 2020-12-16 10:56:23 Time zone: Japan (JST, +0900) System clock synchronized: yes NTP service: active RTC in local TZ: no  i2cdumpコマンドでRTCチップPCF85063Aのレジスタを読み出してみます。レジスタ内容が32アドレスごとに繰り返しています。レジスタが0x00-0x11までしかないからです。レジスタ4が秒を示していて、更新されているのがわかります。 $ sudo i2cdump -y -0 0x51  参考資料: https://akkiesoft.hatenablog.jp/entry/20201217/1608130800 参考資料: http://www.hogetan.net/note/memo/pi_i2ccmd.html |
FAN制御用EMC2301 CM4 I/O boardのデータシートに寄ればファンの制御用のIC EMC2301が搭載されています。i2cdumpコマンドでレジスタ内容を確認してみます。Raspberry Piでよくある冷却ファンの制御はGPIOピンを使ってソフトウェアでPWM制御しているようです。この方法ではCPUパワーが潤沢でないRaspbery Piに負荷をかけ、結局CPU温度を上げてしまうようです。ファンの強さを制御するなら専用のPWMコントローラで制御するほうが理にかなっているでしょう。  EMC2301のデータシートによればレジスタFDhがプロダクトIDでEMC2301:37h / EMC2302:36h / EMC2303:35h / EMC2305:34hを示し、レジスタFEがマニファクチャID 5Dhを示すようです。このFan用PWMコントローラは4PINのファンコネクタ経由でPWMをするだけでなく回転数も読めるようです。回転数を指定して動作させるにはCM4/RockCM3で使用できる4-pinファンを有するヒートシンクは見つからないので、4cmのファンのみ入手してみようかと思っています。今回は直接PWMのデューティ比を制御してみます。PWM1のデューティ比を制御するにはレジスタ30hを書き換えればよいようです。FFhで100%、80hで50%です $ sudo mraa-i2c set 0 0x2f 0x30 0x80   参考資料: https://yokahiyori.com/raspberry-pi-cm4_cooling/#:~:text=ながら調整です。 参考資料: https://lab.sasapea.mydns.jp/2022/07/15/rp-pwmfan/ |
ユーザーモードでのI2Cアクセス$ sudo adduser rock i2c 一旦ログアウトするとこのユーザーからI2Cにアクセスできるようになっています。  参考資料: https://femm.hatenadiary.org/entry/20150501/1430464817 |
ユーザーモードでのGPIOアクセス$ sudo addgroup gpio Adding group `gpio' (GID 1001) ... Done. $ sudo usermod -aG gpio user ついで、この gpio グループに対してデバイス管理ツール(udev rules)を作成します。 $ sudo vi /etc/udev/rules.d/60-gpio-group.rules ファイルの中身は以下のようにします。 SUBSYSTEM=="gpio", KERNEL=="gpiochip[012345]", GROUP="gpio", MODE="0660" SUBSYSTEM=="gpio", PROGRAM="/usr/bin/bash -c '/usr/bin/chown -R root:gpio /sys/class/gpio/gpio*/*'" SUBSYSTEM=="gpio", PROGRAM="/usr/bin/bash -c '/usr/bin/chmod -R ug+rw /sys/class/gpio*/*'" SUBSYSTEM=="gpio", PROGRAM="/usr/bin/bash -c '/usr/bin/chown -R root:gpio /sys/devices/platform/*.gpio/*'" SUBSYSTEM=="gpio", PROGRAM="/usr/bin/bash -c '/usr/bin/chmod -R ug+rw /sys/devices/platform/*.gpio/*'" 再起動後、/dev/gpio* と /sys/class/gpio/は gpioグループからアクセスできるようになっています。  参考資料: https://knowledge.sayabo.com/2022-03-18/aml-s905x-cc-の-armbian-22-02-にて-gpio-を制御する/ |
ユーザーモードでのPWMアクセス$ sudo addgroup pwm Adding group `gpio' (GID 1001) ... Done. $ sudo usermod -aG pwm user groupsコマンドでユーザーはrootグループに参加していないことを確認します。rootグループに参加していると、exportしてできるpwm*フォルダのオーナーがgpioではなくrootになってしまい、うまく動作しません。rootグループの参加している場合にはgpasswd -dコマンドでグループから除外します。 $ groups rock rock : rock root sudo audio video netdev i2c gpio pwm $ sudo gpasswd -d rock root ユーザ rock をグループ root から削除 $ groups rock rock : rock sudo audio video netdev i2c gpio pwm $ ついで、この pwm グループに対してデバイス管理ツール(udev rules)を作成します。 $ sudo vi /etc/udev/rules.d/60-pwm-group.rules ファイルの中身は以下のようにします。 SUBSYSTEM=="pwm*", KERNEL=="pwmchip[01]", GROUP="pwm", MODE="0660" SUBSYSTEM=="pwm*", PROGRAM="/usr/bin/bash -c '/usr/bin/chown -R root:pwm /sys/class/pwma/pwm*'" SUBSYSTEM=="pwm*", PROGRAM="/usr/bin/bash -c '/usr/bin/chown -R root:pwm /sys/devices/platform/*.pwm/*'" SUBSYSTEM=="pwm*", PROGRAM="/usr/bin/bash -c '/usr/bin/chmod -R ug+rw /sys/class/gpio*/*'" SUBSYSTEM=="pwm*", PROGRAM="/usr/bin/bash -c '/usr/bin/chmod -R ug+rw /sys/devices/platform/*.pwm/*'" 再起動後、/sys/class/pwm/は pwmグループからアクセスできるようになっています。ただし、exportしたあとにできるpwm0等のフォルダの属性は変更されません。いまのところ自動でchmod/chownする方法がみつからないので、手動で行う必要があります。 $ echo 0 >> /sys/class/pwm/ 参考資料: https://forums.raspberrypi.com/viewtopic.php?t=316514/ 参考資料: https://forums.raspberrypi.com/viewtopic.php?t=173282 参考資料: https://www.linuxmaster.jp/linux_skill/2012/11/post-134.html |
I2C/PWM/GPIOによるファンコントローラRaspberry Pi OSで標準的にサポートしているファン制御は基本的にOn/Offの制御のみのようです。さらに言えば、Ubuntuではファン制御アプリのサポートはありません。今回のファン制御アプリケーションでは以下の3種類の制御を行うことができます。。
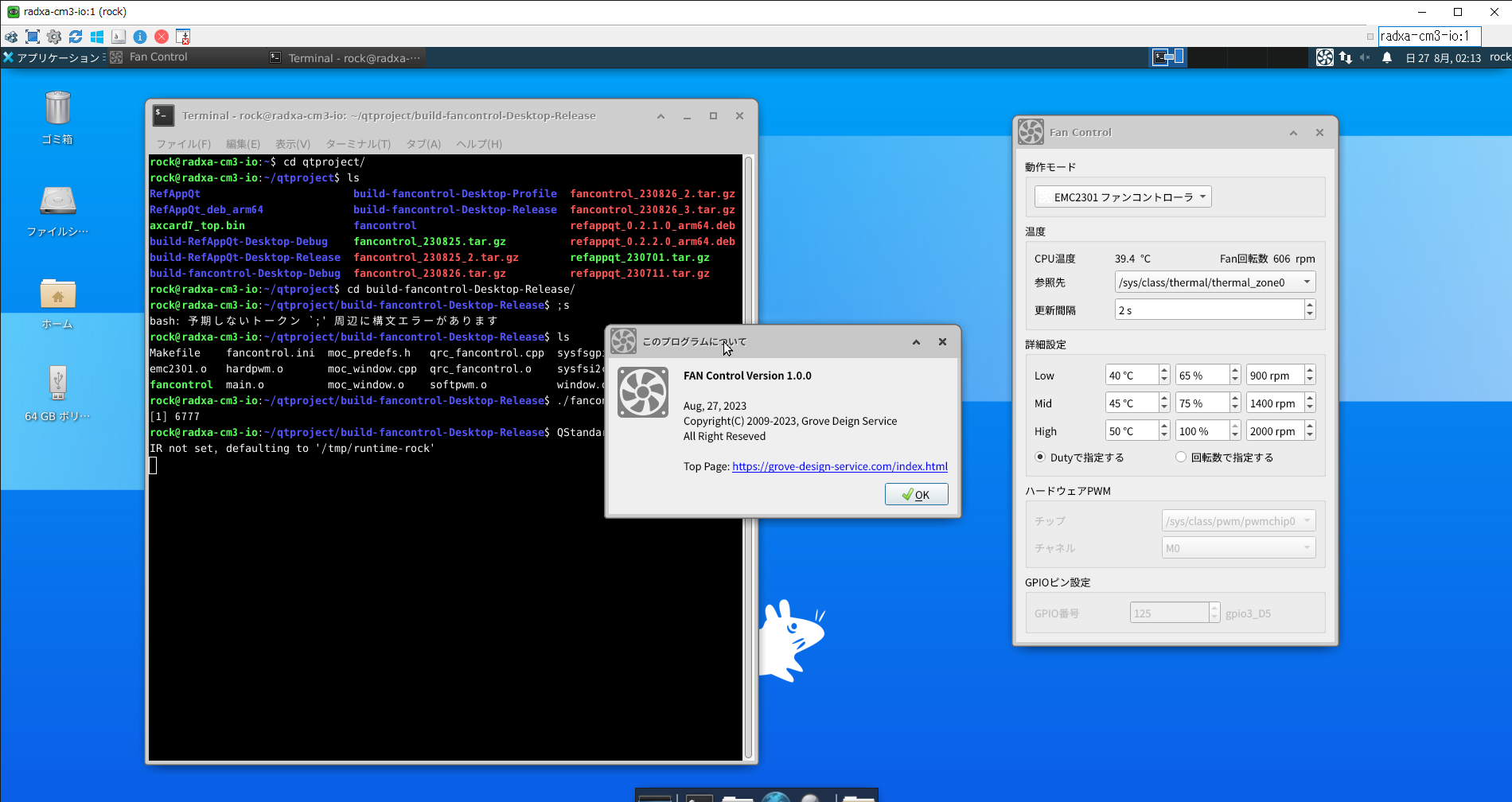 fancontrol_1.0.0.1_arm64.deb for Bullseye/Ubunth20.04 (ARM 64bit) 右クリックしてダウンロードします。インストール方法は以下の通り $ sudo dpkg -i fancontrol_1.0.0.1_arm64.deb アプリケーションを実行する前に、前述の方法で、root権限ではなく、本アプリを使用するユーザーからI2C/PWM/GPIOにアクセスできるように設定しておいてください。特にハードウェアPWMを使用する場合には使用するPWMをあらかじめexportしておく必要があります。 起動後に自動的に起動するためにはUbuntuデスクトップの場合には「自動起動するアプリケーションの設定」で設定します。起動を遅らせるため、Commandの項目を[bash -c "sleep 30 && /opt/group_design_service/fancontrol/fancontrol"]に設定します。   VNC経由での接続の場合、「セッションと起動」で設定できます。  |
|
|
|||